Schwerpunkte
Sensorgestützte Handhabungstechnik – Robotersysteme und -applikationen zur 3D Objekterkennung (Griff in die Kiste/Bin Picking, Depalettieren)
Im Bereich Sensorgestützte Handhabungstechnik fassen wir all jene Robotersysteme zusammen, bei denen mit Hilfe eines Sensors bzw. einer Sensorinformation (z.B. 3D-Vision-Sensor, Kraft-Momenten-Sensor) Objekte identifiziert und lokalisiert oder die Roboterbewegung gesteuert und kontrolliert werden müssen. Die Roboter-Applikationen liegen überwiegend im Bereich der 3D-Objekterkennung („Griff in die Kiste“ oder „Bin Picking“) aber auch im sensitiven Fügen oder Schleifen.
Robotergestützte 3D Objekterkennung: AROTEC bringt Robotern das Sehen bei
3D-Vision-Sensoren sind in der Lage ihr Umfeld oder eine Szenerie dreidimensional (genauer 2,5-dimensional) zu erfassen. Die zugehörige räumliche Information stellen die 3D-Vision-Sensoren in Form einer sogenannten Punktewolke zur Verfügung. Eine auf einem Computer installierte 3D-Objekterkennungssoftware kann innerhalb einer Punktwolke ein bestimmtes Objekt mitsamt seiner räumlichen Lage (oder Pose) darin bestimmen. Kombiniert man einen herkömmlichen Roboter mit einem 3D-Vision-Sensor, so bekommt der Roboter „Augen“ und kann damit sehen.
Vorteil gegenüber 2D Objekterkennungs-Algorithmen
Das zu entnehmende Objekt, Fremdobjekte und Objektüberlagerungen können präziser bestimmt werden. Denn durch die zusätzliche – die dritte – Dimension werden alle vorhandenen Informationen berücksichtigt. Keine Information geht verloren.
3D Objekterkennung – vielseitige Einsatzmöglichkeiten
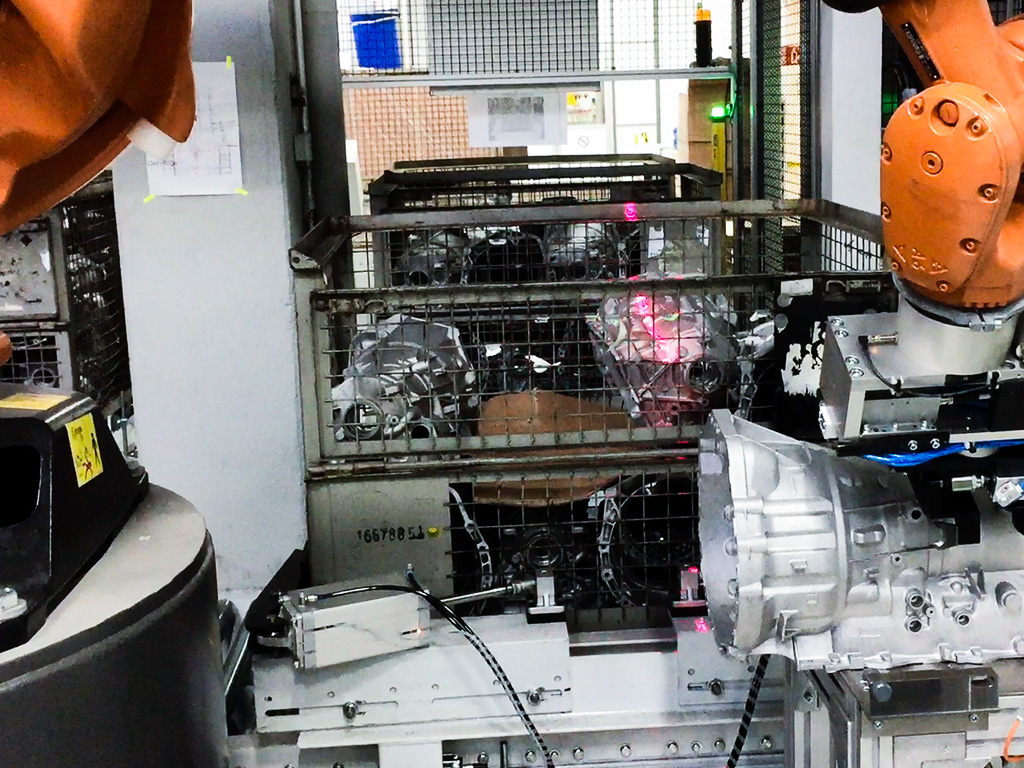
Mit dieser Technologie lassen sich nun zahlreiche neue Roboter-Applikationen realisieren. Die häufigste Anwendung ist die robotergestützte Vereinzelung von teil- oder ungeordnet bereitgestellten Objekten. Bei ungeordneten Objekten sprechen wir vom „Griff in die Kiste“ oder auf Englisch „Bin Picking“, bei teilgeordneten Objekten schlicht vom Depalettieren.
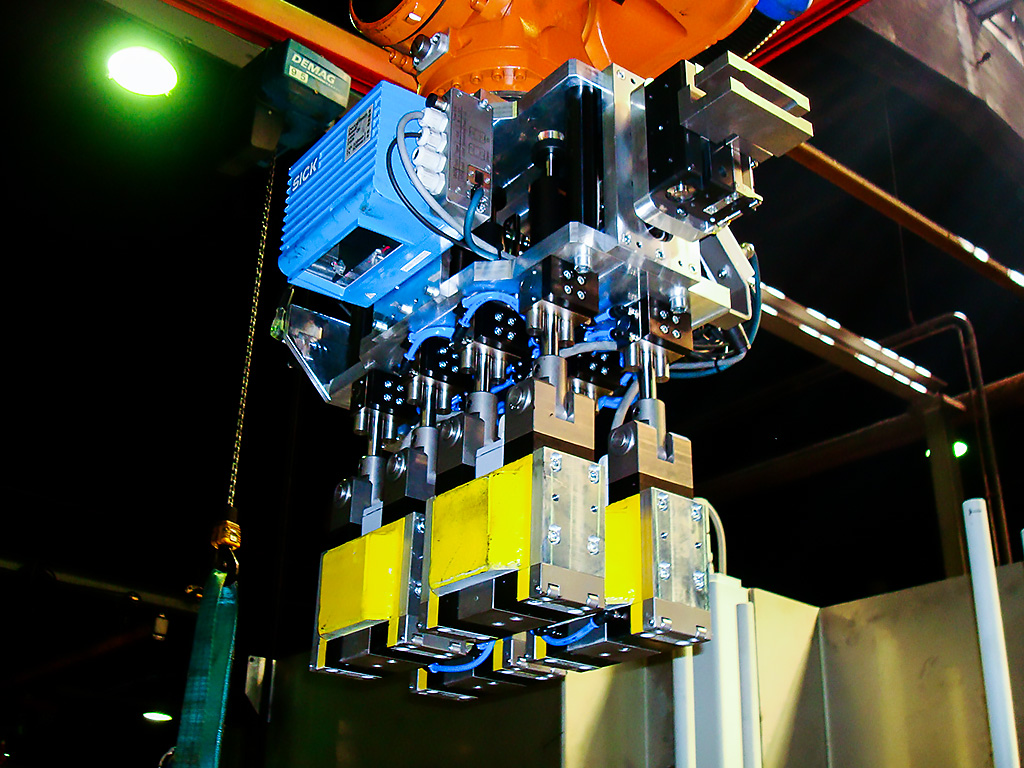
AROTEC ist ein erfahrener Spezialist für den robotergestützten „Griff in die Kiste“. Unsere Robotersysteme für den „Griff in die Kiste“ bestehen im Wesentlichen aus einem Roboter (i.d.R. ein 6-Achs-Industrieroboter), einem spezifischen Endeffektor (oder Greifsystem) und einen 3D-Vision-Sensor mitsamt unserer eigenentwickelten 3D Objekterkennungssoftware ART-3D. Beim robotergestützten Depalettieren von Reifen nennen wir die 3D-Objekterkennungssoftware DEPALGO@Tire.
Die 3D Objekterkennungssoftware ART-3D ist das Herzstück in all unseren robotergestützten Automatisierungslösungen für den „Griff in die Kiste“ oder das Depalettieren. Die 3D-Objekterkennungssoftware übernimmt hierin nicht nur die Aufgabe ein oder mehrere Objekte zu lokalisieren. Sie entscheidet auch darüber, welches Objekt der Roboter mit seinem Endeffektor wie bzw. auf welchem Weg prozesssicher greifen soll. Hierzu dient das in der 3D Objekterkennungssoftware ART-3D integrierte Bahnplanungsmodul. Dieses überprüft, ob das Objekt kollisionsfrei vom Roboter aufgenommen und aus der Kiste gebracht werden kann. Damit der Roboter exakt die geplante Bewegung ausführt, erfolgt die Bahnplanung nicht im kartesischen Raum, sondern im Achsraum des Roboters (inverse Transformation).
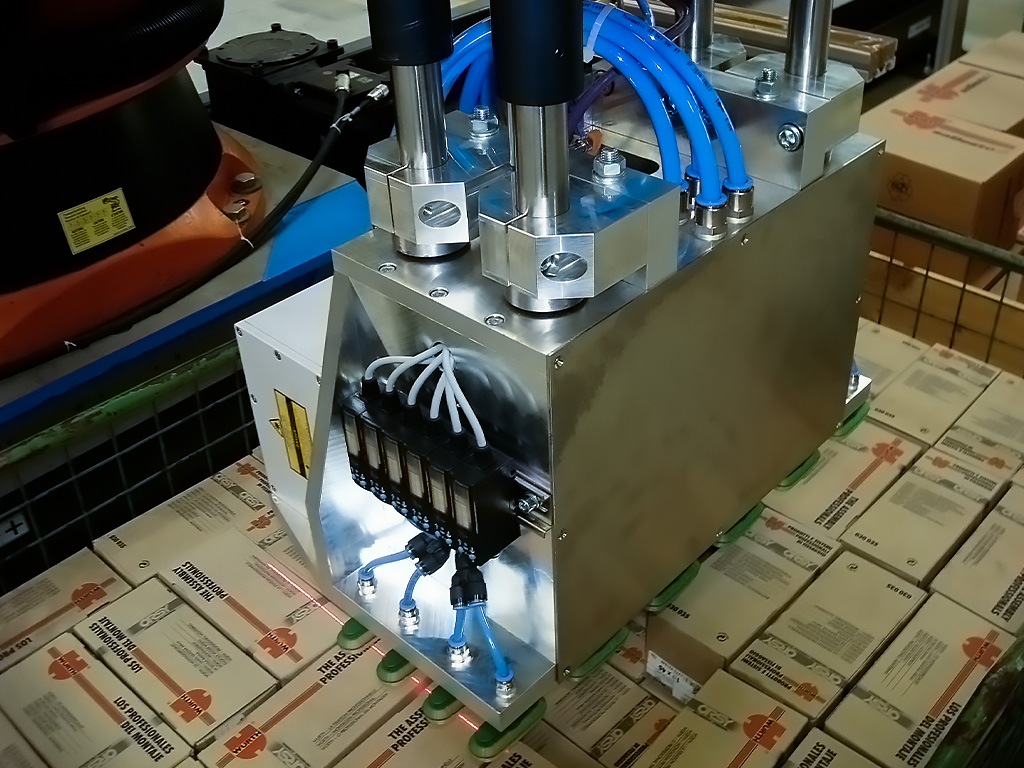
Um eine hohe Entnahmewahrscheinlichkeit bei der robotergestützten Vereinzelung der Objekte zu erzielen, muss besonderes Augenmerk auf das Design des Endeffektors gelegt werden. Ist seine Störkontur zu groß, so können Objekte, die beispielsweise in der Nähe der Seitenwände der Kiste bzw. des Behälters liegen, vom Roboter nicht kollisionsfrei gegriffen werden. Darüber hinaus muss der Endeffektor in der Lage sein, das Objekt an unterschiedlichen Objekt- bzw. Greifpunkten aufnehmen zu können. Hier kommen Ihnen unsere langjährigen Erfahrungen im Bereich der Robotik und des Greiferdesigns zugute. AROTEC unterstützt Sie bei der Greiferentwicklung, um so jedes Produkt greifen zu können – speziell auf Ihre Bedürfnisse abgestimmt.
Zusätzliches Plus: Die 3D-Objekterkennungssoftware kann auf herkömmlichen PCs unter Windows eingesetzt werden.
Die Einsatzgebiete für den „Griff in die Kiste“- oder „Bin Picking“ -Roboter sind beinahe grenzenlos – Vereinzelung von Gießerei-, Schmiede oder Stanz-Erzeugnissen, Depalettierung und Vereinzelung von Kartons, (Kunststoff)-Behältern, Reifen, (TK-)Backwaren, u.v.m.
Die 3D Objekterkennung kann auch in der Qualitätssicherung (zur Güte- und Geometrieprüfung, Vollständigkeitsprüfung, etc.) und bei bahngeführten (Nach-)Bearbeitungsprozessen eingesetzt werden. Beispiele hierfür sind das robotergestützte Entgraten, das roboterstützte Plasmascheiden oder Schweißen.
Mit unseren Robotern für den „Griff in die Kiste“ oder das Depalettieren können Sie 3D Objekterkennung auf höchstem Niveau kennenlernen.
Standardisierte Schnittstellen ermöglichen die Kommunikation mit verschiedenen 3D-Vision-Sensoren (z.B. laufzeitmessende, projizierende oder Lichtschnitt-Sensoren unterschiedlicher Hersteller), der Zellen-Steuerung und einem übergeordneten Host/Leitstand-System.

Sie wünschen mehr Information über unsere Robotersysteme für den „Griff in die Kiste“ oder unsere 3D Objekterkennungssoftware? Dann nehmen Sie Kontakt mit uns auf! Wir entwickeln auch für Sie ein maßgeschneidertes Robotersystem. Egal wie kompliziert Ihre Anforderungen auch sein mögen. Egal in welcher Branche Sie tätig sind.
